Had my exam today in the morning. I could do reasonably well……lets hope for good result.
After coming back from college at 5.00PM , started working on my project…..I am really enjoying time with GSoC. Thought of using some different method to determine acceleration due to gravity.
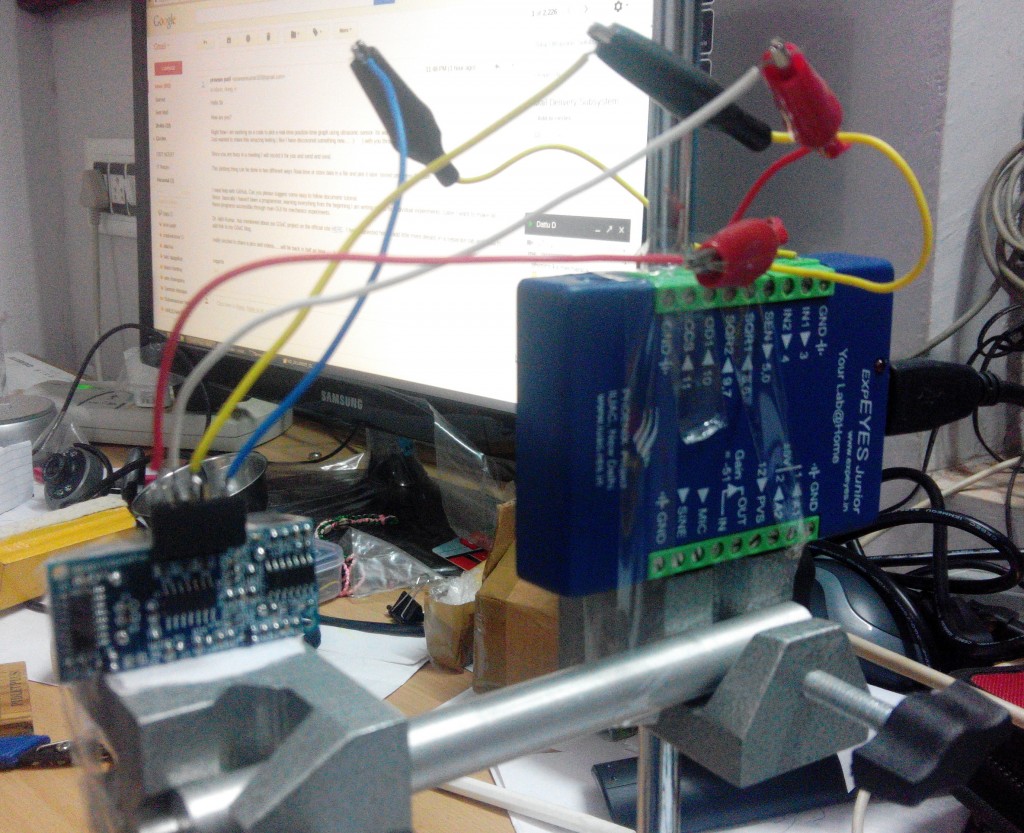
Used the same set up of linear track in inclined position at about 45 degrees. Allowed vehicle to glide downwards and plotted position-time graph. Got straight line with positive slope as expected. Then used photo-gate with expeyes kit and could make time measurements.
Got this pick-up ready ……
This can generate a square wave as it passes through photogate. Acceleration can be determined using the signal generated. Excited to see its working.
But now I have a problem ….how to measure the acceleration from the wave pulse generated. I think I should find time between rising and falling edge the wave-pulse. Will work on this tomorrow ……..Feeling Sleepy now…. 🙂
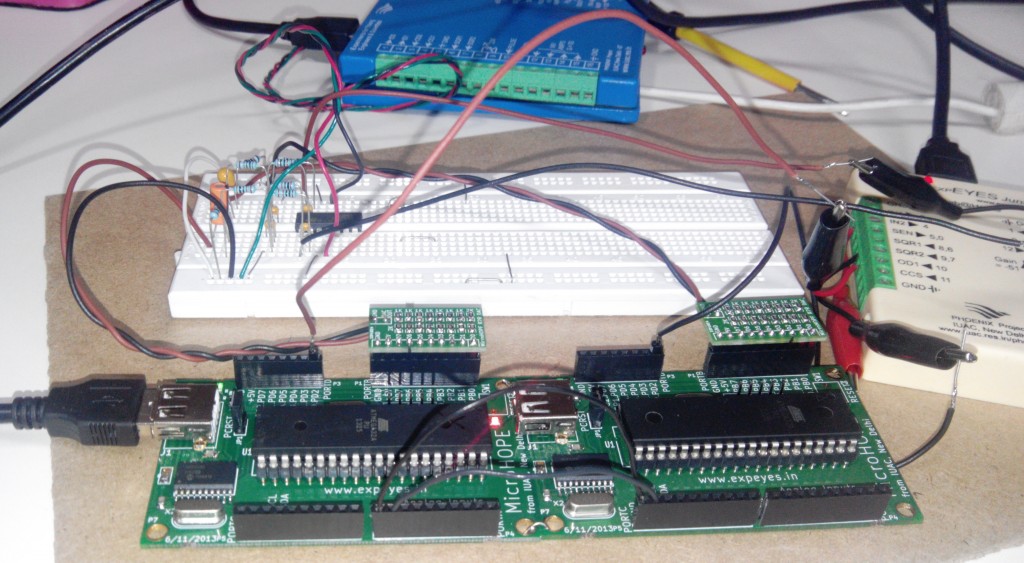
This is the photo-gate I have used ….(photo from www.expeyes.in)
 Need to modify this as it is difficult to mount above linear track. will be going for design similar to photogate which I used with old version of ” Phoenix” box……..
Need to modify this as it is difficult to mount above linear track. will be going for design similar to photogate which I used with old version of ” Phoenix” box……..
Its here…

………………………..
Any idea for easy measurement of acceleration using the pickup shown above?
Some proprietary closed source devices use this method……….( of course they come at a very high cost price)
Please share any modification in the pickup oar any idea for accurate measurement of acceleration using photo-gates….
This will result in a very low cost setup………thanks to FOSS…… 🙂
I love being a FOSSASIAN….. 🙂 🙂 🙂